
Fotometría PSF
25 May 2020Desde el punto de vista astronómico, la Fotometría es la medición, calculo y cuantificación de la luz emitida por diferentes objetos astronómicos. Etimilogicamente, proviene de la voz griega “φωτος” (photos,luz) y del sufijo “μετρια” (metria, medida).
De esta forma, la fotometría es la medición del flujo integrados $F$ (cuentas/tiempo x area) de una fuente en el cielo, y se define matemáticamente de la siguiente forma:
$$ F(t)=\displaystyle \int_0^{t} F_{\lambda}(\lambda) S_{\lambda}(\lambda) d\lambda, $$Donde $F_{\lambda}$ es el flujo específico proveniente de la fuente, y $S_{\lambda}$ la función de transmisión, que toma en cuenta la respuesta del detector, la condiciones atmosféricas y el filtro que se ha usado. Lógicamente, y por cómo está planteada la medición, mientras mayor sea el tiempo $t$, mayor flujo integrado se obtiene.
Magnitudes y flujos
La magnitud astronómica es, por definición, una cantidad relativa. Esto quiere decir que su valor es definido con respecto a una fuente específica (como por ejemplo, el sistema fotométrico basado en la estrellas Vega). Dos variaciones populares de la magnitud astronomómica son las siguientes:
Magnitud Bolométrica: $$ \displaystyle m_1 - m_2 = 2.5\log_{10}\left(\frac{F_2}{F_1}\right) $$
Magnitud específica: $$ m_{\lambda,1} - m_{\lambda,2} = 2.5\log_{10}\left(\frac{F_{\lambda,2}}{F_{\lambda,1}}\right) $$
Entonce, necesitamos los Flujos de, al menos, dos estrellas relativamente cercana. Hay tres métodos principales para medir dicho flujo $F$:
- Fotometría de apertura.
- Fotometría diferencial.
- Fotometría de función de dispersión de punto, o point-spread-function (PSF).
Cada una de estas técnicas posee diferentes filosofías, ventajas y desventas, pero todos tienen en común algunos parámetros. Partamos con la primera:
Fotometría de apertura
Esta técnica se basa en considerar todas las cuentas (ADU) dentro de un radio $R$ definido, el cual es llamado "apertura", teniendo como regla que el radio de apertura debe ser, a lo menos, menor que el seeing $R<seeing$ (visión o visibilidad astronómica).
Hay que recordar que una imagen (astronómica, fotográfica, etc) es un arreglo de datos de $(n \times n)$ píxeles, entonces los valores $I_{ij}$ describiran las coordenadas físicas de la imagen. Naturalmente, el flujo de luz proveniente de una fuente estelar, por un tiempo de antemano conocido, puede ser estimado sumando cada pixel $I_{ij}$ dentro de la circunferencia caracterizada por el radio R. En palabras más precisas, dentro de la apertura.
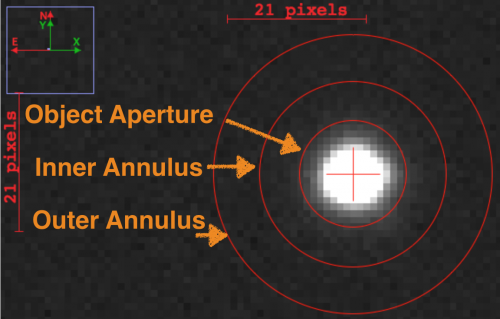
Luego, debemos sustraer la contribución del cielo a la medición usando alguna estimación directa del valor de "cielo". Podemos pensar en esta contribución como el ruido de fondo de la imagen, y será cuantificado como el valor promedio de una imagen en lugares donde no existen objetos astronómicos. Para estimar el cielo, se define una región llamada "Annulus", que es una estructura creada con dos circulos que posee forma de donut. La idea es medir la contribución local (el área circundante) de la imagen para obtener el flujo usando algún estadístico, digamos, el promedio.
La Figura 1 representa de mejor manera este concepto. Por ejemplo, medimos todos los píxeles $I_{ij}$ dentro del radio interior (Inner Annulus marcado en la imagen) y el exterior (Outer Annulus), obtenemos un valor promedio y será considerado el cielo.
Bajo esta interpretación, el número total de cuentas $I$ dentro del radio de apertura $R$ será la suma de cada uno de los píxeles $I_{ij}$ de la imagen dentro del radio R considerado, menos la contribución del cielo $I_{cielo}$ en cada píxel:
$$ I=\sum_{i,j} I_{ij} - n_{pixeles}*I_{cielo} $$donde:
- $I$: Cuentas totales de la fuente dentro del radio de apertura.
- $I_{ij}$: Cuentas específicas en cada pixel dentro del radio de apertura.
- $n_{pixeles}$: Número de píxeles dentro de la apertura.
- $I_{cielo}$: Valor de la contribución estimada del cielo usando el annulus. Usualmente es llamado 'Cielo'.
Generalmente, el valor del cielo se obtiene desde la distribución del número de cuentas dentro de la imagen.
Finalmente, la magnitud instrumental viene dado por:
$$ m=-2.5\log_{10}(I) + Constante $$El termino constante depende de las variables asociadas a las condiciones de observación (por ejemplo la extincion atmosferica, la masa de aire, el seeing), y básicamente es lo que se modifica para poder calibrar la fotometría en cierca escala de interés.
La gran desventaja de este método es la alta densidad estelar. No es posible usar fotometría de apertura cuando la fuente bajo estudio no está aislada, que es el caso de grupos de estrellas como los Cúmulos globulares, o en el centro de nuestra galaxia. De alguna forma, el veloz avance de la resolución espacial de las nuevas generaciones de telescopios ha demostrado que la fotometría de apertura es la primera aproximación a la medición del flujo estelar (o gáctico).
Fotometría Diferencial
La fotometría diferencial consiste en usar estrellas de comparación dentro de la misma imagen para estudiar una estrella en particular, y así ignorar hasta cierto punto las variables atmosféricas y el tiempo de integración. Este método está enfocado en cuantificar la variabilidad estelar de la fuente de interés, y para ser implementada es necesario elegir unas 4 o 10 estrellas de comparación C, medir su magnitud instrumental $m_C$ a través de varias observaciones (o épocas) y calcular el diferencial de magnitud $\Delta m_C$ de cada estrela de comparación, con el fin de cuantificar el cambio de brillo de la estrella de interés.
Este método ofrece muy buenos resultados cuando la cadencia de observación es alta, siendo uno de los favoritos del AAVSO, Kepler, entre otros, pero desconozco si es un método que se siga usando de forma masiva, pero es una interesante forma de medir la luz de las estrellas.
Fotometría PSF
Este método se basa en la idea que todas las fuentes en una imagen tienen exactamente la misma forma. En otras palabras, la distribución espacial de la luz capturada sobre una imagen sigue alguna regla general, que puede ser usada para estimar el flujo F.
PSF es un acrónimo en ingles Point spread functionLa aproximación más usual es asumir que las fuentes poseen un perfil Gaussiano con la misma desviación estándar. Con esta aproximación, el "tamaño" o apertura para una fuente estará caracterizada por el seeing atmosférico. Dependiendo del tamaño de la imagen en la cual trabajemos, podemos considerar que tenemos, en promedio, las mismas perturbaciones atmosféricas. Bajo estas consideraciones, todas las estrellas deberían ser descritas por la misma función puntual de dispersión (point spread function, PSF).
La forma radial de una Gaussiana bidimensional se describe como:
$$ I(r) = I_{0}\ exp \left[ \frac{-(r-r_{0})^{2}}{2\sigma ^2} \right] $$donde:
- $I(r)$ Es la intensidad para algún pixel de coordenadas $(x,y)$.
- $r=\sqrt{x^2+y^2}$ es la componente radial de una Gaussiana 2-D.
- $I_{0}$ Es el peak de intensidad del perfil.
- $\sigma$ Es la desviación estándar del perfil (el ancho del perfil Gaussiano).
La simpleza y utilidad de la fotometría PSF recae en que todas las estrellas pueden ser modeladas usando, en este caso, un perfil Gaussiano con la misma desviación estándar (seeing) $\sigma$, y cada una con diferentes intensidades $I_0$, lo que reduce el problema a elegir un set de parámetros para cada imagen a analizar.
A continuación, se presentan 3 estrellas de diferentes magnitudes, pero que presentan la misma forma:
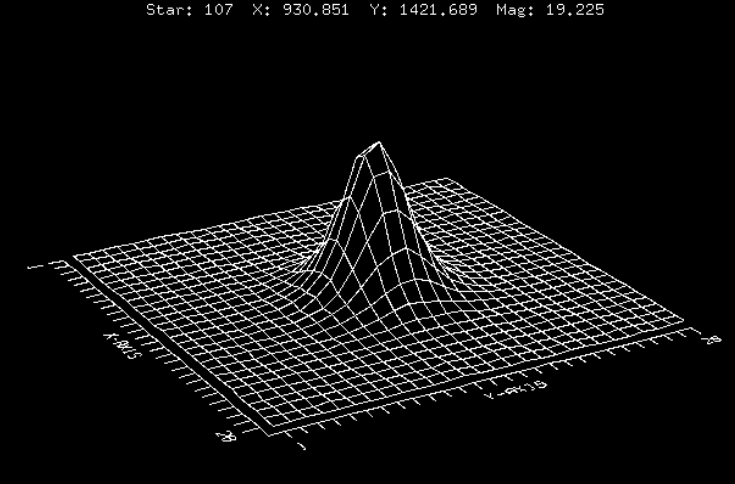
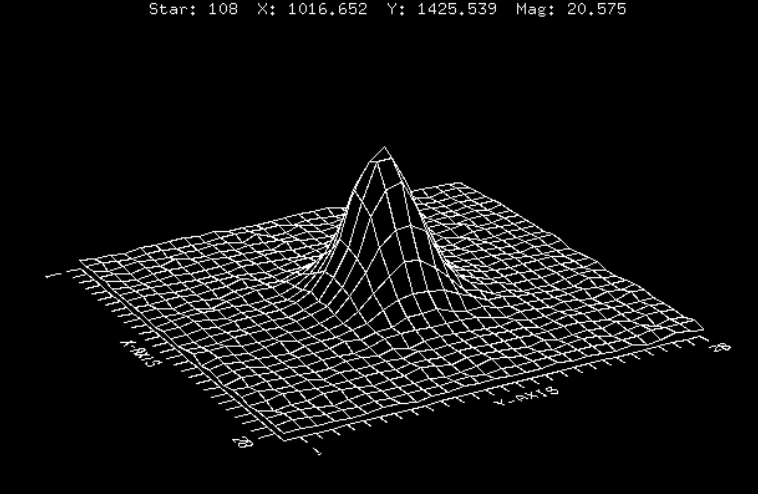
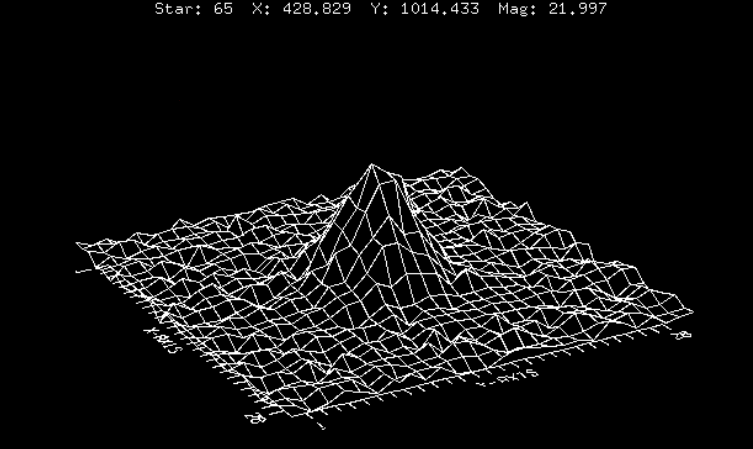
¿Cuál es la diferencia? La forma de la fuente se mantiene, pero el nivel de ruido del fondo crece. En general, si el peak de intensidad $I_0$ está por sobre el límite del ruido, podrá ser detectada y analizada.
Para entender mejor la idea, simularemos una estrella usando una distribución gaussiana y estudiaremos sus parámetros con más detalles. Le añadiremos ruido para hacer todo un poco más realista.
#Agregamos las librerias fundamentales para trabajar.
%matplotlib inline
import matplotlib.pyplot as plt
import matplotlib.cm as cm
import numpy as np
import os
import sys
#Creamos el dominio:
Rango_imagen=100
numero_filas = 100
numero_columnas = 100
x = np.linspace(-Rango_imagen, Rango_imagen, numero_columnas)
y = np.linspace(-Rango_imagen, Rango_imagen, numero_filas)
X,Y = np.meshgrid(x, y)
#calculo de la intensidad
r0 = 0 #Desplazamiento
sigma = 20. #Desviación estándar.
I0= 1000. #Peack de intensidad.
R = np.sqrt((X-r0)**2 + (Y-r0)**2) #Componente radial.
#Calculamos el Perfil.
Perfil = I0*np.exp(-0.5*(R/sigma)**2)
#Simulamos ruido que emule la contribución de fondo:
Valor_piso = 100.
desviacion_estandar_ruido = 150
Dimension_imagen = Perfil.shape
background = np.random.normal(Valor_piso, desviacion_estandar_ruido, Dimension_imagen)
#componemos todo:
Perfil_ruido = Perfil + background
#Hacemos el plot:
plt.figure(figsize=(12,6))
plt.subplot(121)
plt.title('Perfil Gaussiano')
plt.imshow(Perfil, cmap=cm.jet)
plt.colorbar(orientation='vertical', fraction=0.046)
plt.xlabel('pixel X',fontsize=15)
plt.ylabel('pixel Y',fontsize=15)
plt.subplot(122)
plt.title('Perfil Gaussiano con ruido')
plt.imshow(Perfil_ruido, cmap=cm.jet)
cbar = plt.colorbar(orientation='vertical', fraction=0.046)
cbar.ax.get_yaxis().labelpad = 20
cbar.ax.set_ylabel('Intensidad $I_0$', rotation=270, fontsize=15)
plt.xlabel('pixel X',fontsize=15)
plt.show()

A la izquierda de la imagen, se puede ver lo que puede ser describido como la simulación de un objeto astronómico usando una distribución espacial gaussiana. El mapa de colores describe su inconfundible perfil. A la derecha, la misma imagen con la fuente simulada, pero ha sido agregado una componente de ruido de fondo también generado usando una distribución normal o gaussiana. Hagamos cortes transversales en dos fuentes generadas con diferente intensidad $I$ y el mismo seeing $\sigma$ para poder visualizar los cambios y efectos del ruido.
#Creamos dos perfiles con la misma desviación estándar y diferente intensidad:
centro_imagen = len(X[:,0])/2
I1 = I0
I2 = 2700. #Peack de intensidad.
#Creamos un segundo perfil para comparar:
Perfil_2 = I2*np.exp(-0.5*(R/sigma)**2)
#Simulamos (otro) ruido que emule la contribución de fondo:
background = np.random.normal(Valor_piso, desviacion_estandar_ruido, Dimension_imagen)
#componemos el segundo perfil:
Perfil_ruido_2 = Perfil_2 + background
plt.figure(figsize=(10,7))
plt.plot(X[centro_imagen],Perfil_ruido[centro_imagen],'ro',ms=7,label='$I_1 = %1.0f$' %I1)
plt.plot(X[centro_imagen],Perfil_ruido_2[centro_imagen],'kH',ms=6,label='$I_2 = %1.0f$' %I2)
plt.xlabel('pixel X',fontsize=15)
plt.ylabel(r'Intensidad',fontsize=15)
plt.plot([min(X[centro_imagen]),max(X[centro_imagen])], Valor_piso*np.ones(2),'g-',lw=4,label="Piso constante")
plt.legend(fontsize=15)
plt.show()

En ambos casos, el perfil gaussiano se mantiene a pesar del ruido, pero la menos intensa se ve mayormente perjudicada por contribuciones de fondo. En ambos casos, el brillo de las fuentes será proporcional al flujo contendio bajo esta Gaussiana. Así, podemos describir la diferencia de magnitud entre dos fuentes de la siguiente forma:
$$ \displaystyle m_1-m_2 =-2.5 \log \left( \frac{I_1}{I_2} \right) $$Así, en vez de contar fotones y restar la contribución de fondo, sólo necesitamos encontrar el perfil que ajusta de mejor manera a $I(r)$, esto nos dará el valor del peak espefícico $I$. Y así, es posible calcular la magnitud instrumental $m$ de la forma:
$$ m = -2.5 \log(I_0) + const. $$Donde la constante está dada por el sistema fotométrico utilizado (es decir, el punto cero).
Ventajas de la fotometría PSF
- Precisión: Como ya hemos comentado, la fotometría de apertura suma todos los píxeles dentro de una apertura arbitraria. Si alguno de estos píxeles es un pixel caliente, un rayo cósmico u otro, podría aumentar drásticamente el valor de la medición fotométrica. El ajuste de un perfil para obtener el valor $I_0$ convierte a la fotometría PSF en un estimador robusto a píxeles malos, rayos cósmicos y otros contaminantes.
- Puede ser usado en campos muy poblados: Como sabemos la forma que debe tener cada estrella, podemos estimar el flujo que debe aportar cada fuente al estudiar regiones de alta densidad estelar, como cúmulos globulares o el centro galáctico. Podemos aplicar iterativamente perfiles sobre fuentes para remover contribuciones con el fin de caracterizar de mejor manera estas fuentes que se solapan.
Otros perfiles que pueden ser usados
Usualmente, dependiendo de las condiciones ambientales o de las fuentes en estudio, se pueden usar diferentes perfiles para describir las fuentes. A modo de ejemplo, presentamos algunos de ellos:
- Perfil Lorentziano: $$ \displaystyle L(r) = \frac{1}{1+\left(\frac{r}{\sigma}\right)^2} $$
- Perfil Lorentziano modificado: $$ \displaystyle L_m(r) = \frac{1}{1+\left(\frac{r^2}{\sigma^2}\right)^b} $$
- Perfil de Moffat: $$ \displaystyle M(r) = \frac{1}{\left[1+\left(\frac{r}{\sigma}\right)^2\right]^b} $$
Donde b es un parámetro libre que se ajustan para obtener la contribución del brillo de la fuente.
Realizando Fotometría PSF
Existen varias formas de obtener la fotometría PSF desde imágenes astronómicas. Generalmente cada survey ofrece entre su documentación cuál es la tecnica fotométrica que sugieren, el software y sus posibles limitancias. Algunos softwares populares y (que yo personalmente he usado) son los siguientes:
DAOPHOT: Extractor de fuentes clásico, muy usado en el software IRAF en tiempos tempranos, donde se realizaba la calibración de objetos a mano. Disponible en paquetes de utilidades astronómicas y distribuido generalizadamente.
DoPHOT: Segun uno de los autores, uno de los softwares más usados que provee diferentes modalidades de extracción de fuentes. Doy completa fe de su reputación.
SexTractor: El peor acrónimo del mundo, estamos de acuerdo. Software muy mañoso en su instalación, pero efectivo para obtener catálogos de fotometría sobre una imagen FITS.
Ahora, veremos un ejemplo (y explicación) sobre cómo simular una fuente y realizarle fotometría usando algunas librerias implementadas en python. Más información disponible en la documentacio del siguiente link.
Vamos describiendo cada paso y modificando a nuestras anchas a ve qué sucede:
#Importamos todas las librerías necesarias para nuestro propósito:
from photutils.detection import IRAFStarFinder
from photutils.psf import IntegratedGaussianPRF, DAOGroup
from photutils.background import MMMBackground, MADStdBackgroundRMS
from astropy.modeling.fitting import LevMarLSQFitter
from astropy.stats import gaussian_sigma_to_fwhm
from astropy.table import Table
from photutils.datasets import (make_random_gaussians_table,
make_noise_image,
make_gaussian_sources_image)
#Ajustamos algunos valores para empezar
sigma_psf = 3.0
tshape = (32, 32) #Dimensiones de la imagen
sources = Table() #crea una tabla para mapear los parametros de 3 fuentes
sources['flux'] = [700, 1900, 1000]
sources['x_mean'] = [14, 16, 16]
sources['y_mean'] = [15, 15, 17]
sources['x_stddev'] = sigma_psf*np.ones(3)
sources['y_stddev'] = sources['x_stddev']
sources['theta'] = [0, 0, 0]
sources['id'] = [1, 2, 4]
#Crea la imagen, que será la suma de 3 fuentes,
#y agregando ruido basado en una distribución de Poisson
# y ruido normal:
image = (make_gaussian_sources_image(tshape, sources) +
make_noise_image(tshape, type='poisson', mean=8.,
random_state=1) +
make_noise_image(tshape, type='gaussian', mean=0.,
stddev=5., random_state=1))
#ploteamos la imagen resultante:
plt.figure(figsize=(5,6))
plt.imshow(image, cmap='viridis', aspect=1, interpolation='nearest')
plt.title('Imagen simulada')
plt.colorbar(orientation='vertical', fraction=0.046, pad=0.04)
plt.show()

#importamos más funciones especificas:
from photutils.detection import IRAFStarFinder
from photutils.psf import IntegratedGaussianPRF, DAOGroup
from photutils.background import MMMBackground, MADStdBackgroundRMS
from astropy.modeling.fitting import LevMarLSQFitter
from astropy.stats import gaussian_sigma_to_fwhm
from photutils.psf import IterativelySubtractedPSFPhotometry
#Medimos el cielo usando el estadistico MAD:
bkgrms = MADStdBackgroundRMS()
#usamos la imagen creada como dato de entrada:
std = bkgrms(image)
#Método para encontrar iterativamente fuentes en la imagen.
iraffind = IRAFStarFinder(threshold=3.5*std, \
fwhm=sigma_psf*gaussian_sigma_to_fwhm, \
minsep_fwhm=0.01, roundhi=5.0, roundlo=-5.0, \
sharplo=0.0, sharphi=2.0)
daogroup = DAOGroup(2.0*sigma_psf*gaussian_sigma_to_fwhm)
#estimamos la contribucion del cielo (background):
mmm_bkg = MMMBackground()
#eligen el modelo PSF:
psf_model = IntegratedGaussianPRF(sigma=sigma_psf)
#Creamos el modelo a aplicar en nuestra imagen:
photometry = IterativelySubtractedPSFPhotometry(finder=iraffind,
group_maker=daogroup,
bkg_estimator=mmm_bkg,
psf_model=psf_model,
niters=1, fitshape=(11,11))
#Realizamos la fotometría:
resultados = photometry(image=image)
#revisamos los parámetros principales de la fotometría, el flujo:
list(result_tab)
El programa ha estimado el centroide (x_fit,y_fit) la fuente extraida, el que está localizado (con respecto a la imagen creada) en (X,Y)= (15.489, 15.775), y que posee un flujo = 2320.57 unidades arbitrarias. Como hemos superpuesto 3 fuentes con intensidades de 700, 1900, 1000, me hace mucho sentido que el programa extraiga una sola fuente con un flujo cercano a la superposición de las tres fuentes.
Las piezas de código que hemos explorado anteriormente están llenas de secretos, sorpresas y demases. Por ejemplo, a partir del modelo aplicado es posible literalmente extraer la fuente de la imagen, creando un mapa residual que se crea restando el modelo con la imagen. Veamos:
#obtenemos la imagen residual de la ejecución anterior.
residual_image = photometry.get_residual_image()
plt.figure(figsize=(9,6))
plt.subplot(121)
plt.imshow(image, cmap='viridis', aspect=1, interpolation='nearest')
plt.title('Imagen simulada')
plt.subplot(122)
plt.imshow(residual_image, cmap='viridis', aspect=1,
interpolation='nearest', origin='lower')
plt.title('Imagen residual')
plt.show()

Esto puede ser muy útil para estudiar fuentes astronómicas que están demasiado cerca de una fuente brillante, como es el caso de los exoplanetas. Una idea que lleva directamente al coronógrafo.
Por último, voy a poner una imagen real y hacerle fotometría, pero me queda como trabajo futuro.
Agradecido por su tiempo.